1. Komponen
 |
| Arduino |
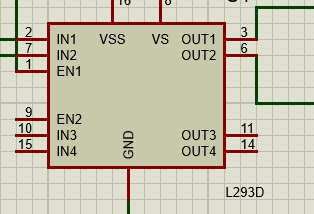 |
| IC 293D |
 |
| Motor |
 |
 |
#define in1 9 //Deklarasi pin 9 sebagai input 1
#define in2 10 //Deklarasi pin 10 sebagai input 2
void setup() { //Semua kode dalam fungsi ini di eksekusi sekali
pinMode(in1, OUTPUT); //Deklarasi in1 sebagai OUTPUT
pinMode(in2, OUTPUT); //Deklarasi in2 sebagai OUTPUT
}
void loop() { //Semua kode dalam fungsi ini dieksekusi berulang
digitalWrite(in1, HIGH); //in1 diberi logika 1
digitalWrite(in2, LOW); //in2 diberi logika 0
delay(1000); //Jarak waktu 1000 ms setelah input dieksekusi
digitalWrite(in1, LOW); //in1 diberi logika 0
digitalWrite(in2, LOW); //in2 diberi logika 0
delay(1000); //Jarak waktu 1000 ms setelah input dieksekusi
digitalWrite(in1, LOW); //in1 diberi logika 0
digitalWrite(in2, HIGH); //in2 diberi logika 1
delay(1000); //Jarak waktu 1000 ms setelah input dieksekusi
digitalWrite(in1, LOW); //in1 diberi logika 0
digitalWrite(in2, LOW); //in1 diberi logika 0
delay(1000); //Jarak waktu 1000 ms setelah input dieksekusi
}
1. Pada saat pin Enable sebelumnya terhubung, kemudian diputus tapi kenapa masih bisa jalan atau bergerak?
Pada rangkaian hardwere, saat pin enable diputus, akan membuat motor mati. Namun pada softwere, motor tetap berjalan. Hal ini disebut dengan keadaan plotting atau bukan berlogika 1, juga bukan berlogika 0, sehingga motor tetap berjalan.
Rangkaian download
Video download
Program download
Tidak ada komentar:
Posting Komentar